前方交会是一款利用三点得到第四点坐标的计算工具。其中需要观测数据(角度)和已知数据(坐标)来计算结果,是测绘学(一级学科)与工程测量(二级学科)所需应用的计算工具。前方交会界面简洁,操作方便,体积小巧,功能全面,而且在已知点A、B、C上观测角度α1、α2、β1、β2,推算出P点的坐标。
功能介绍
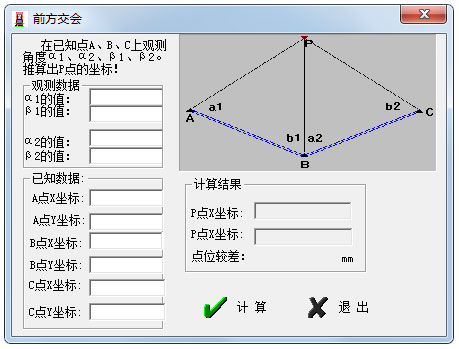
在已知A、B、C上观测角度a1、a2、b1、b2,推算出p点坐标。
观测数据:a1、a2、b1、b2
已知数据:A点X坐标、A点Y坐标、B点X坐标、B点Y坐标、C点X坐标、C点Y坐标
计算结果:P点X坐标、P点Y坐标
内容定义:
在两个已知点以上分别对待定点相互进行水平角观测,并根据已知点的坐标及观测角值计算出待定点坐标的方法。
设有A、B、P三点,A、B为已知坐标的点,P为未知点,用仪器测得∠PAB和∠PBA,根据A、B的坐标可求得P点的坐标,这种方法叫做前方交会
常见问题
1、测量中什么叫前方交会和后方交会?
这是控制测量中的基本测量方法,用经纬仪。现在一般很少用了。大概意思是这样的:前交是用经纬仪在不同地点(都是已知坐标的)照准同一目标,当然国家规范上对角度和距离都有一定的限制,用不同组坐标推算目标坐标,还要检核。后交是经纬仪架在未知点上,向已知坐标点照准,计算方法相似。
2、全站仪的前方交会法和后方交会法分别应用于什么不同情况下?
一般用于几个控制点不能通视的情况下。以前也采用这两种方法做控制,加密控制点。前方交回和后方交回用的控制点个数不一样的。
3、怎么用全站仪前方交会,需要用棱镜照准么?
首先必须要有至少2个控制点(假如分别为A,B),在A上架设仪器对中整平,瞄准B后水平角置零,然后瞄准目标点P(比如塔尖),记下水平角度∠BAP,然后将仪器搬至B上架设仪器对中整,瞄准A后水平角置零,然后瞄准目标点P(比如塔尖),记下水平角度∠ABP.(这样计算只有平面坐标,如果需要高程值话还需要量取仪器高,棱镜高,同时还要测量竖直角)。







VMware Workstation Pro 是一款功能强大的桌面虚拟计算机软件,支持在单台计算机上运行多个虚拟机实例,可进行高级虚拟化设置和管理。已发布至 26H1 版本,此次更新也是整合安全补丁,并纠正了...

Win11 26H1 28000.2173(KB5089570)是 RP 频道最新的预览版补丁,此次更新在打印设置中添加了一个新图标用于显示是否支持 Windows 受保护的打印模式,并改进了第三方驱动程序与 midisrv.exe 的...

AMD 显卡驱动是专为 AMD 系列显卡量身打造的官方驱动程序,现已更新至 26.5.2 版本。此次更新不仅修复了运行《RoadCraft》时可能会出现应用程序间歇性崩溃或驱动程序超时,还支持《极限竞速:地...

CPU-Z 是一款功能强大的系统信息检测工具,拥有精准的硬件识别能力和简洁直观的界面设计,同时还扩展了对主板芯片组、内存规格、显卡信息等硬件组件的检测能力,此次更新不仅添加了对大量硬件的...

Intel Arc 显卡驱动是英特尔官方推出的显卡核心驱动程序,现已更新至 32.0.101.8801 版本。此次更新为《极限竞速:地平线 6》《乐高蝙蝠侠:黑暗骑士的遗产》《深海迷航 2:异星水域》三款游戏...

云小记是一款简洁好用的桌面便签软件,现已更新至 1.4.5 版本。本次更新新增番茄时钟、定时关机工具,并修复已知的问题。该软件支持随手记笔记、待办清单与日程提醒,用户还可以自定义便签样式...
























































发表评论
共0条
评论就这些咯,让大家也知道你的独特见解
立即评论以上留言仅代表用户个人观点,不代表系统之家立场